穿越物理世界的智能奇点
自变量机器人聚焦自研“通用具身智能大模型”,
构建具备精细操作能力的通用机器人,是国内最早采用完全端到端路径实现通用具身智能大模型的公司之一。
公司自研的「GreatWall」操作大模型系列的WALL-A,具备自主感知、决策与高精度操作能力,已在多个维度达到全球领先。
同时,公司坚持软硬一体同步迭代,自主研发并持续优化适配多模态大模型控制的机器人本体,更好地满足开放环境中的精细操作和稳定运行需求。
目前,自变量的机器人本体已在多步骤复杂任务场景中落地应用。
了解更多

自变量机器人聚焦自研“通用具身智能大模型”,
构建具备精细操作能力的通用机器人,是国内最早采用完全端到端路径实现通用具身智能大模型的公司之一。
公司自研的「GreatWall」操作大模型系列的WALL-A,具备自主感知、决策与高精度操作能力,已在多个维度达到全球领先。
同时,公司坚持软硬一体同步迭代,自主研发并持续优化适配多模态大模型控制的机器人本体,更好地满足开放环境中的精细操作和稳定运行需求。
目前,自变量的机器人本体已在多步骤复杂任务场景中落地应用。
了解更多
围绕自研的 WALL-A 操作大模型,
实现从感知、理解到动作控制的全流程智能统一。
彻底突破传统机器人依赖规则与编程的局限,
实现在复杂环境中的高精度、自主化作业。

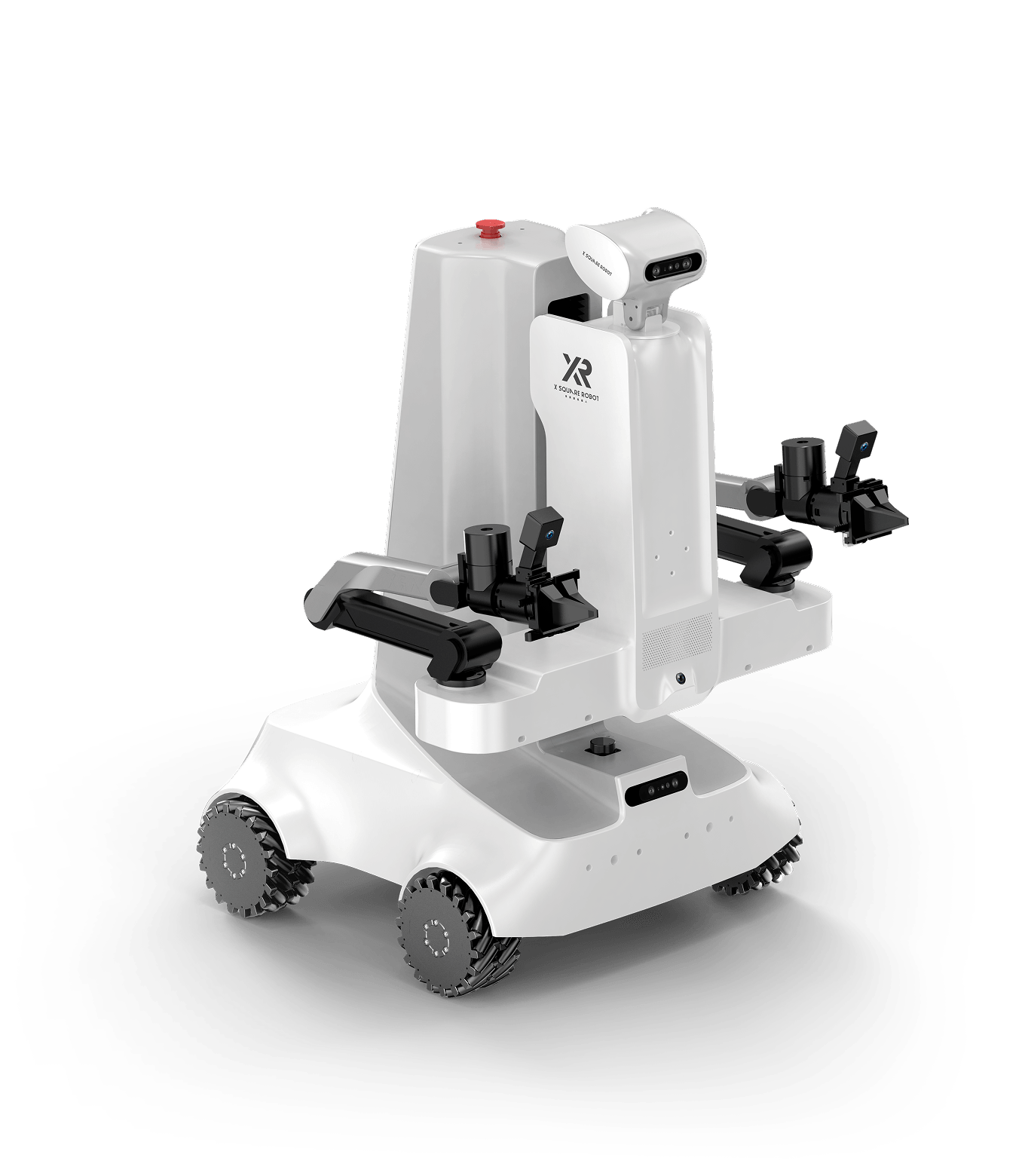
新一代通用轮式仿人形机器人
了解详情通用轮式双臂机器人
QUANTA X1
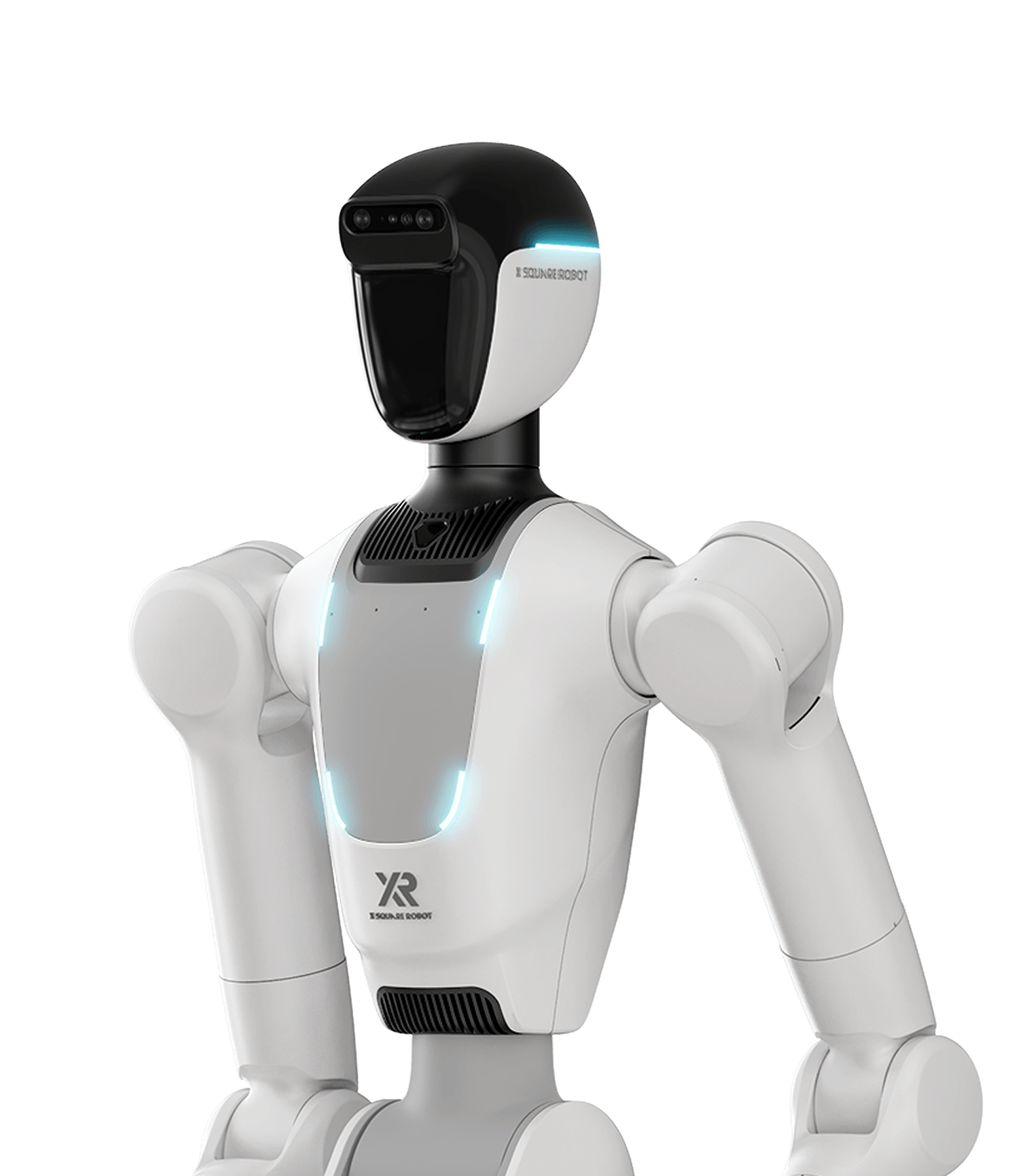
新一代具身轮式仿人形机器人
QUANTA X2
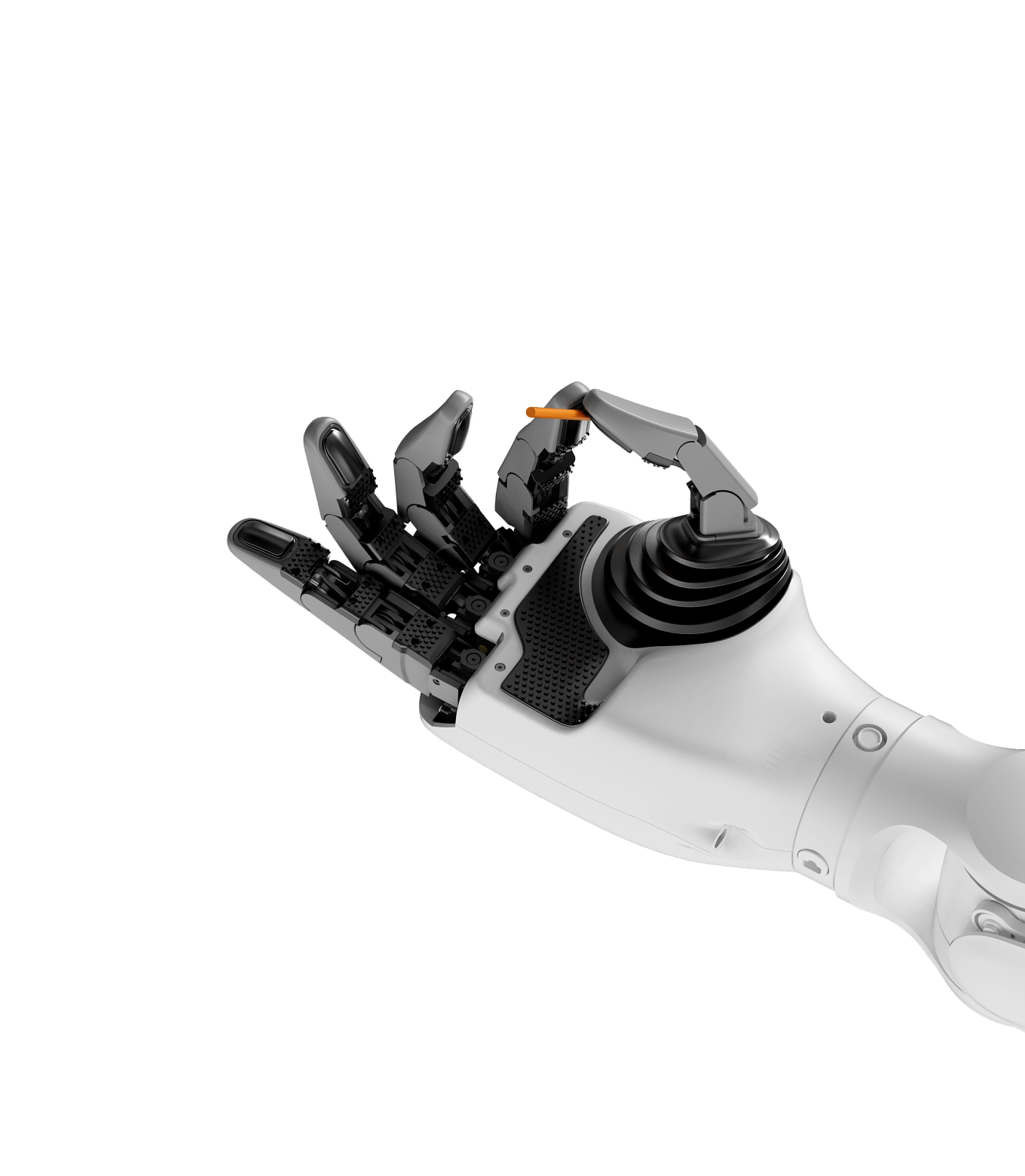
高自由度仿人五指灵巧手
ArtiXon Hand
围绕自研的 WALL-A 操作大模型,实现从感知、理解到动作控制的全流程智能统一,
彻底突破传统机器人依赖规则与编程的局限。实现复杂环境中的高精度、自主化作业。







